Tools for Hardware Testing¶
Single Finger Test¶
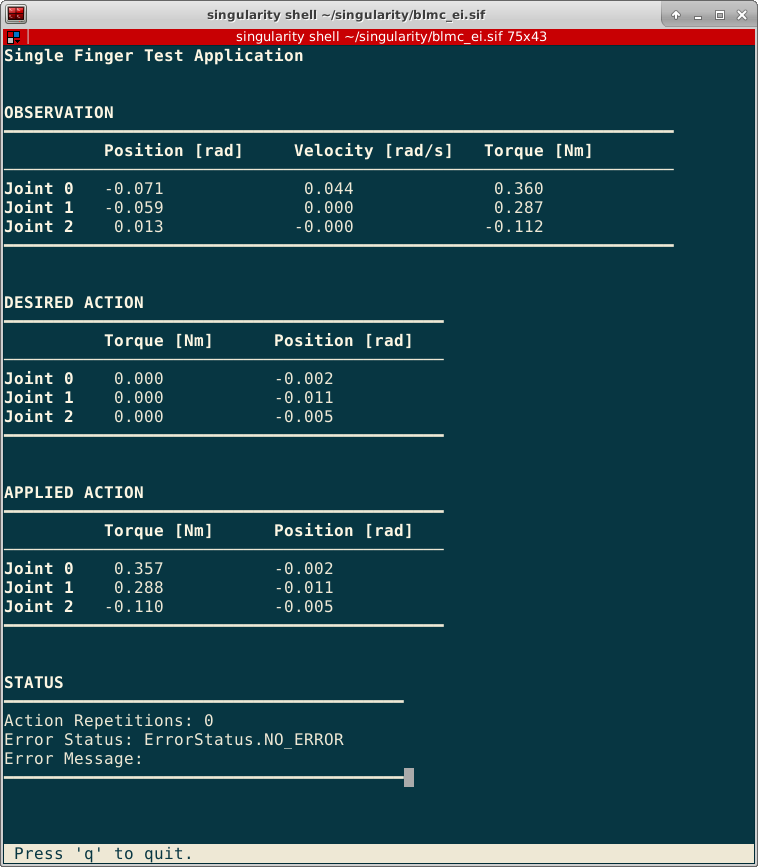
The robot_fingers package provides a script single_finger_test.py for
testing basic functionality of a single Finger. After initialization, it holds
all joints at their current position using position control. All available data
is shown and constantly updated on the terminal:
Running¶
Start the application with the following command:
ros2 run robot_fingers single_finger_test
For this application, homing is done without end stops, that is the joints will simply home on the nearest encoder index without offset.
To quit simply press “q”.
Configuration¶
The robot configuration used in application is found in
robot_fingers/config/single_finger_test.yml. Typically the configuration
should work well, however, you may need to adjust the CAN ports to match the
ports on which the finger is connected.