spi_motor_board.hpp File Reference
Interface for the master board designed by Thomas Floyols https://github.com/open-dynamic-robot-initiative/master-board. More...
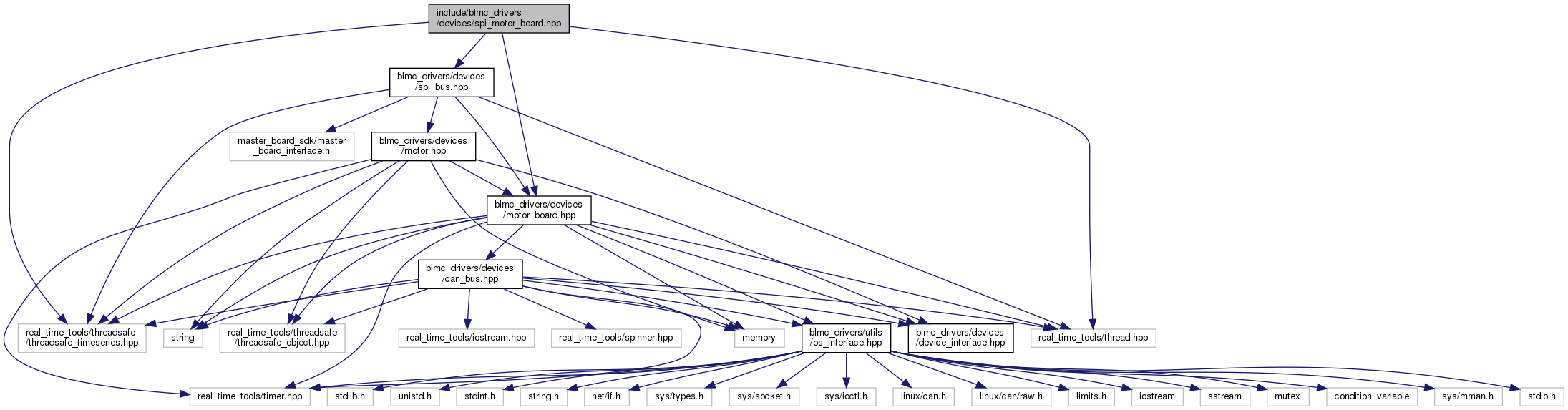
#include "blmc_drivers/devices/spi_bus.hpp"#include "real_time_tools/thread.hpp"#include "real_time_tools/threadsafe/threadsafe_timeseries.hpp"#include "blmc_drivers/devices/motor_board.hpp"
Include dependency graph for spi_motor_board.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | blmc_drivers::SpiMotorBoard |
Namespaces | |
| blmc_drivers | |
| This namespace is the standard namespace of the package. | |
Detailed Description
Interface for the master board designed by Thomas Floyols https://github.com/open-dynamic-robot-initiative/master-board.
- Version
- 0.1
- Date
- 2019-11-14
- Copyright
- Copyright (c) 2019-2020, New York University and Max Planck Gesellschaft.
