Logic of Actions and Observations¶
In this section the logic of the time series used for communication between front and back end and for synchronization between actions and observations is explained. For more details, please see our paper on the open-source version of the TriFinger robot.
On Time Series and Time Relation of Actions and Observations¶
All data transfer between the front end (= user code) and the back end (= robot
hardware) goes through so called time series. When calling
append_desired_action(action), the action is not applied immediately but is
appended to the time series of desired actions which serves as a queue.
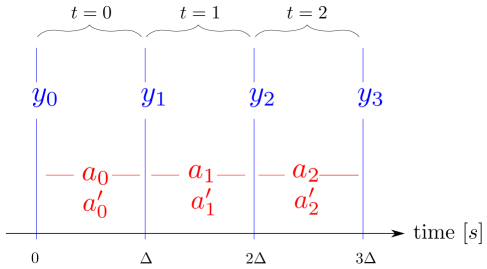
At each time step, identified by a time index t, the backend takes the action
at position t from the “desired actions” time series and sends it to the robot
driver. At the same time an observation is acquired from the robot and added to
the “observation” time series. This means that the effect of the desired action
a_t is not yet visible in the observation y_t as is illustrated below
(a'_t corresponds to the applied action, see
Desired vs Applied Action).
append_desired_action() returns the time index t at which the appended
action will be executed. Methods like get_observation() expect a time index
as input. If the specified time step has already passed, they immediately
return the value from the corresponding step. If it lies in the future, the
method will block and wait until the specified time step is reached and then
return.
Note that the buffer size of the time series is limited (see the
history_length argument of SingleProcessRobotData and
MultiProcessRobotData). If the buffer is full, the oldest element is
discarded. Trying to access an time index that is not in the buffer anymore
results in an exception.
This design allows for simple code that is automatically executed at the control rate of the robot:
# send zero-torque action to get first observation, see explanation below
zero_torque_action = robot_interfaces.trifinger.Action()
t = frontend.append_desired_action(zero_torque_action)
observation = frontend.get_observation(t)
while True:
action = smart_algorithm_to_compute_next_action(observation)
t = frontend.append_desired_action(action)
# The t given above refers to the moment the given action will be
# executed. Right now, this is in the future, so the following call
# will automatically wait until the action is actually applied to the
# platform
observation = frontend.get_observation(t)
Send Action to Start Backend¶
In the beginning of the program execution, the back end is idle and waiting for the first action. Only after the first action is received, the loop is started that applies actions and writes observations to the time series.
This means you first have to send an action before you can read the first observation!
There are applications where an observation is needed before sending the first real action (e.g. when the action depends on the current position). In this case you need to send a “neutral” action first. How this action may look is robot dependent. The TriFinger robot, for example, can safely be started with a zero-torque action:
Python:
# an action without arguments defaults to zero torque
zero_torque_action = robot_interfaces.trifinger.Action()
t = frontend.append_desired_action(zero_torque_action)
first_observation = frontend.get_observation(t)
C++:
Action zero_torque_action = Action::Zero();
auto t = frontend.append_desired_action(zero_torque_action);
auto first_observation = frontend.get_observation(t);
Note that the creation of the zero torque action in the above example is specific to the _TriFinger_ robot. For other robots, the creation of the action would need to be adjusted to the action type of that specific robot.
When Next Action Is Not Provided In Time¶
If the back end reaches a time step t but the user did not yet provide
an action for this time step (e.g. because the user code is running
slower than 1 kHz), the back end automatically sets the desired action
for step t to the same as the one of t - 1.
This is indicated to the user through the action_repetitions field in
the status message which contains the number of times the current action
has been repeated.