pd_control.cpp File Reference
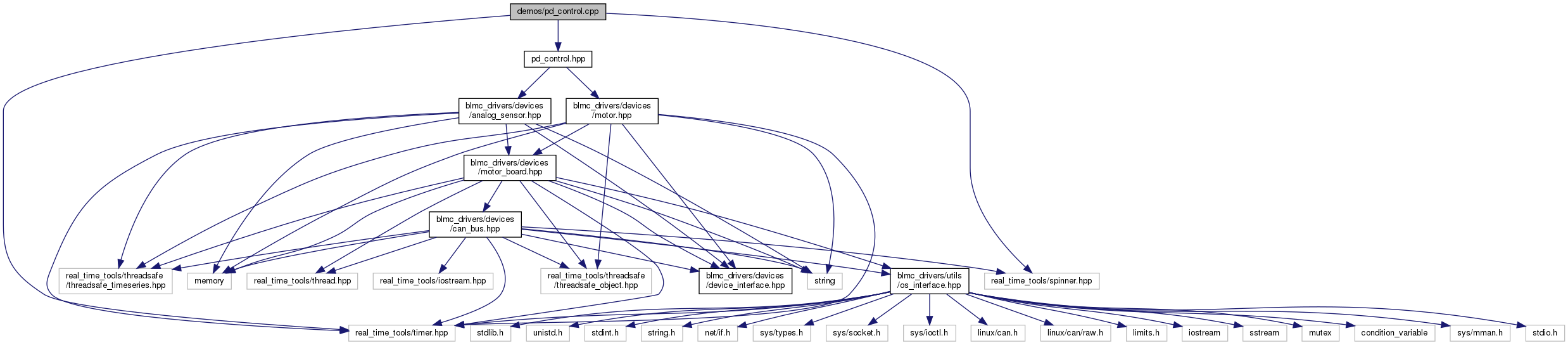
#include "real_time_tools/timer.hpp"#include "real_time_tools/spinner.hpp"#include "pd_control.hpp"
Include dependency graph for pd_control.cpp:
Namespaces | |
| blmc_drivers | |
| This namespace is the standard namespace of the package. | |
Detailed Description
- Copyright
- Copyright (c) 2018-2020, New York University and Max Planck Gesellschaft, License BSD-3-Clause
