Coordinate Frame and Joint Axes¶
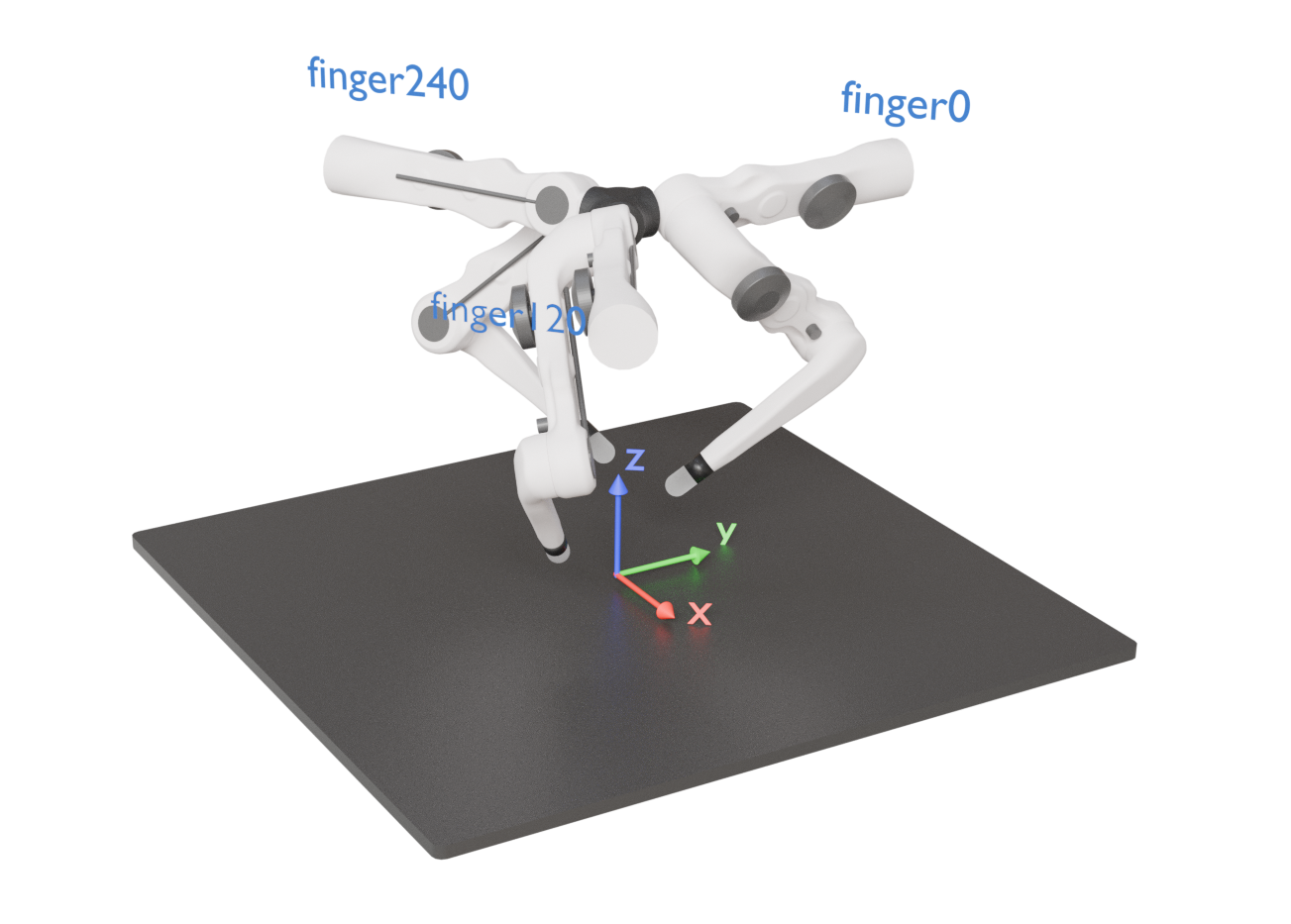
Reference Frame¶
The reference frame of the robot is in the center between the fingers on the ground. The first finger (“finger0”) is aligned with the y-axis, the other two are rotated by 120° and 240° around the z-axes:
Joint Axes¶
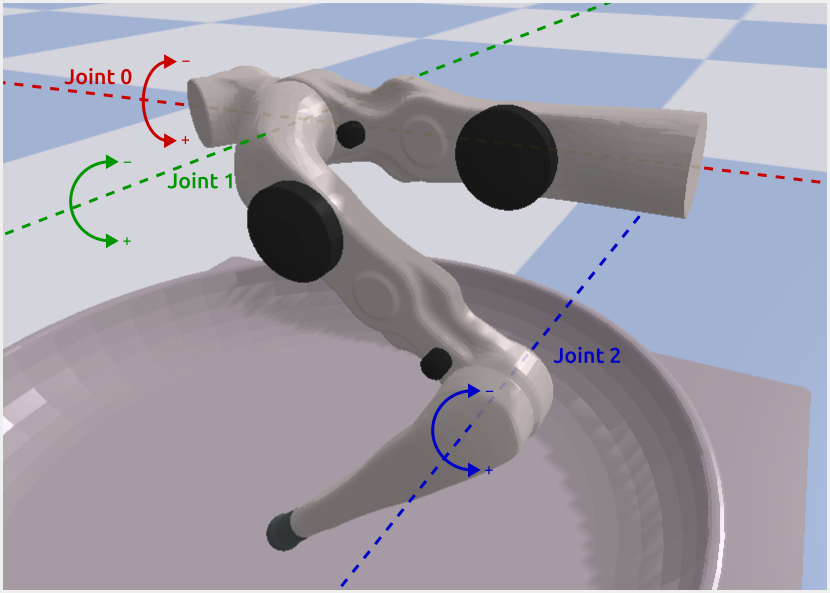
For “FingerPro” and “FingerEdu” fingers, directions of rotation (i.e. which direction is positive and which is negative) is as depicted in the image above.
For “FingerOne”, joint 1 is inverted, the others are the same.
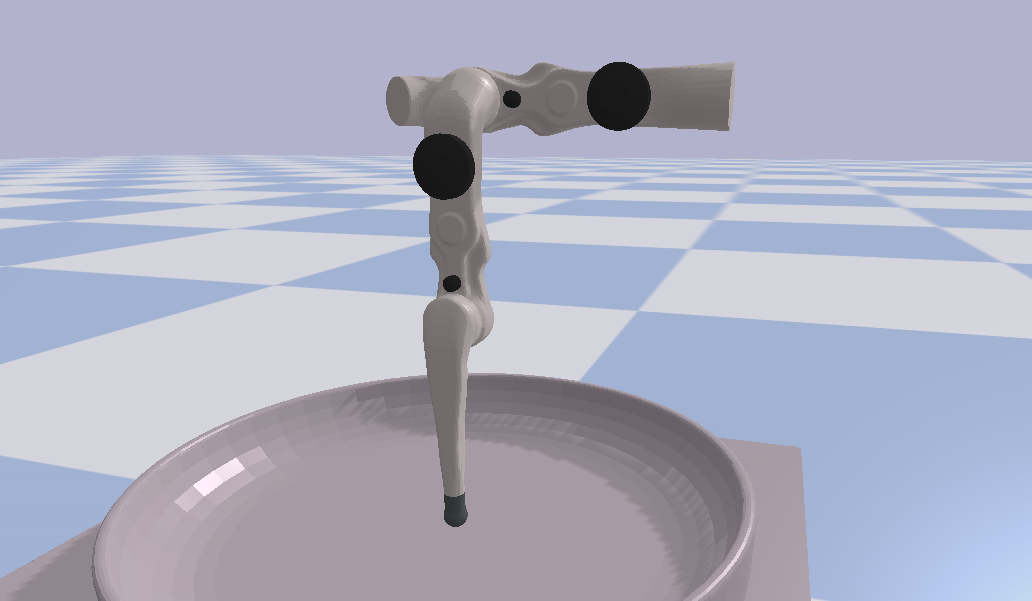
Zero Position¶
All joints are in zero-position when the finger is pointing straight down: