os_interface.hpp File Reference
#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <stdint.h>#include <string.h>#include <net/if.h>#include <sys/types.h>#include <sys/socket.h>#include <sys/ioctl.h>#include <linux/can.h>#include <linux/can/raw.h>#include <limits.h>#include <real_time_tools/timer.hpp>#include <iostream>#include <sstream>#include <mutex>#include <condition_variable>#include <sys/mman.h>
Include dependency graph for os_interface.hpp:

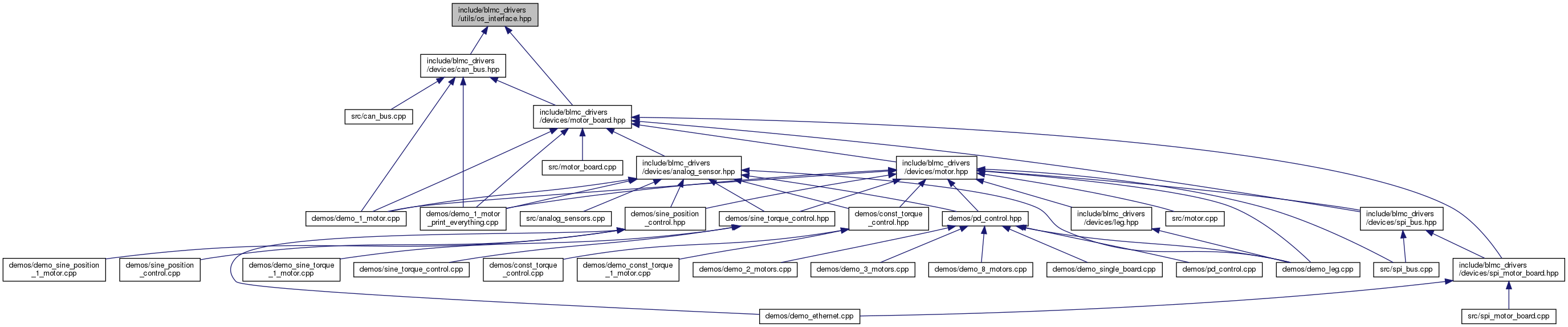
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| osi | |
| Common include. | |
Macros | |
| #define | rt_fprintf fprintf |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_printf printf |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_dev_socket socket |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_dev_ioctl ioctl |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_dev_close close |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_dev_setsockopt setsockopt |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_dev_bind bind |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_dev_recvmsg recvmsg |
| Create a common type_def to wrap xenomai and posix. | |
| #define | rt_dev_sendto sendto |
| Create a common type_def to wrap xenomai and posix. | |
Typedefs | |
| typedef struct can_frame | can_frame_t |
| xeno specific include More... | |
| typedef canid_t | can_id_t |
| Create a common type_def to wrap xenomai and posix. | |
| typedef uint64_t | nanosecs_abs_t |
| Create a common type_def to wrap xenomai and posix. | |
| typedef std::mutex | osi::Mutex |
| Wrapper around the posix specific Mutex implementation. | |
| typedef std::condition_variable | osi::ConditionVariable |
| Wrapper around the posix specific ConditionVariable implementation. | |
Functions | |
| void | osi::send_to_can_device (int fd, const void *buf, size_t len, int flags, const struct sockaddr *to, socklen_t tolen) |
| Use the osi workspace API to communicate with the can bus. More... | |
| void | osi::close_can_device (int socket) |
| This function is closing a socket on the Can device. More... | |
| void | osi::receive_message_from_can_device (int fd, struct msghdr *msg, int flags) |
| Poll? a message from the CAN device. More... | |
| void | osi::initialize_realtime_printing () |
| This function is needed in xenomai to initialize the real time console display of text. | |
| void | osi::sleep_ms (const double &sleep_time_ms) |
| This function uses eather the xenomai API or the posix one. More... | |
| double | osi::get_current_time_ms () |
| Get the current time in millisecond. More... | |
| void | osi::make_this_thread_realtime () |
| This methd is requiered in xenomai to create a real time thread. | |
Detailed Description
- Version
- 0.1
- Date
- 2018-11-27
- Copyright
- Copyright (c) 2018
Typedef Documentation
◆ can_frame_t
| typedef struct can_frame can_frame_t |
xeno specific include
Define typedefs to make code compatible with Xenomai code. Create a common type_def to wrap xenomai and posix.
