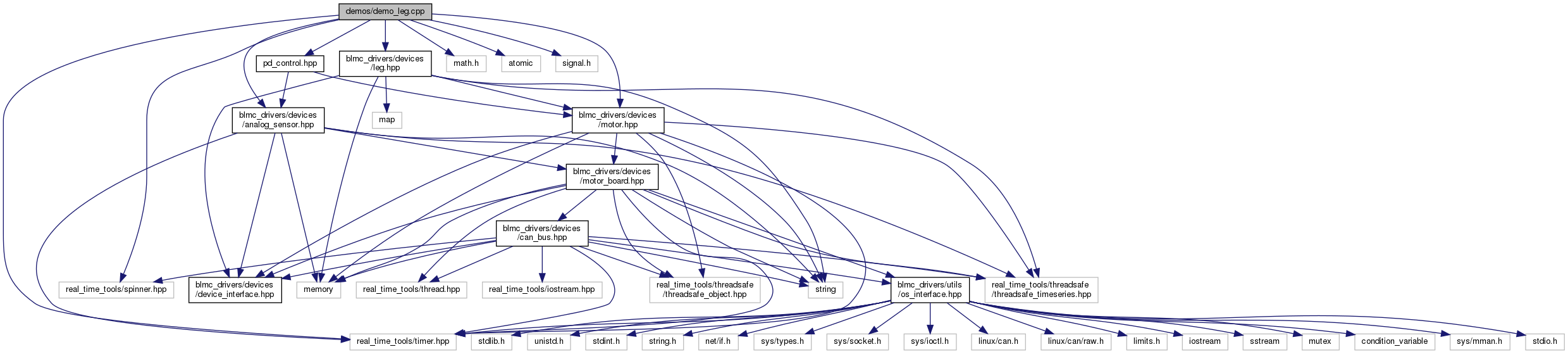
#include "real_time_tools/timer.hpp"#include "real_time_tools/spinner.hpp"#include <blmc_drivers/devices/motor.hpp>#include <blmc_drivers/devices/analog_sensor.hpp>#include <blmc_drivers/devices/leg.hpp>#include <math.h>#include <atomic>#include <signal.h>#include <pd_control.hpp>
Include dependency graph for demo_leg.cpp:
Classes | |
| class | Controller |
| This is a simple PD control on one motor and one slider. More... | |
| class | LegController |
| Simple PD control on the leg. More... | |
Functions | |
| std::atomic_bool | StopDemos (false) |
| This boolean is here to kill cleanly the application upon ctrl+c. | |
| void | my_handler (int) |
| This function is the callback upon a ctrl+c call from the terminal. More... | |
| int | main (int, char **) |
Detailed Description
- Copyright
- Copyright (c) 2018-2020, New York University and Max Planck Gesellschaft, License BSD-3-Clause
Function Documentation
◆ my_handler()
| void my_handler | ( | int | ) |
This function is the callback upon a ctrl+c call from the terminal.
- Parameters
-
s
